ESP32 CAM Rover with robotic arm










Description
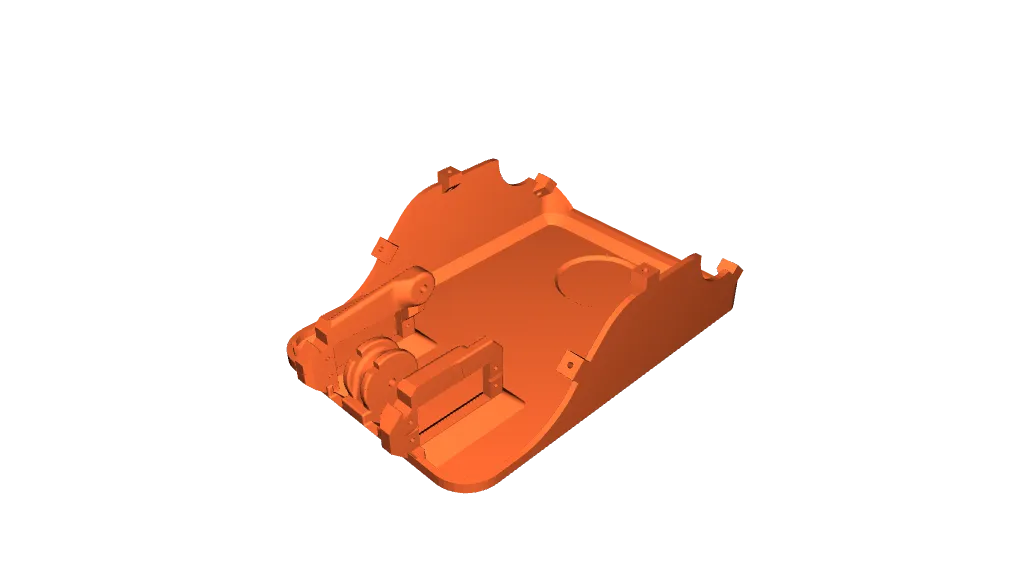
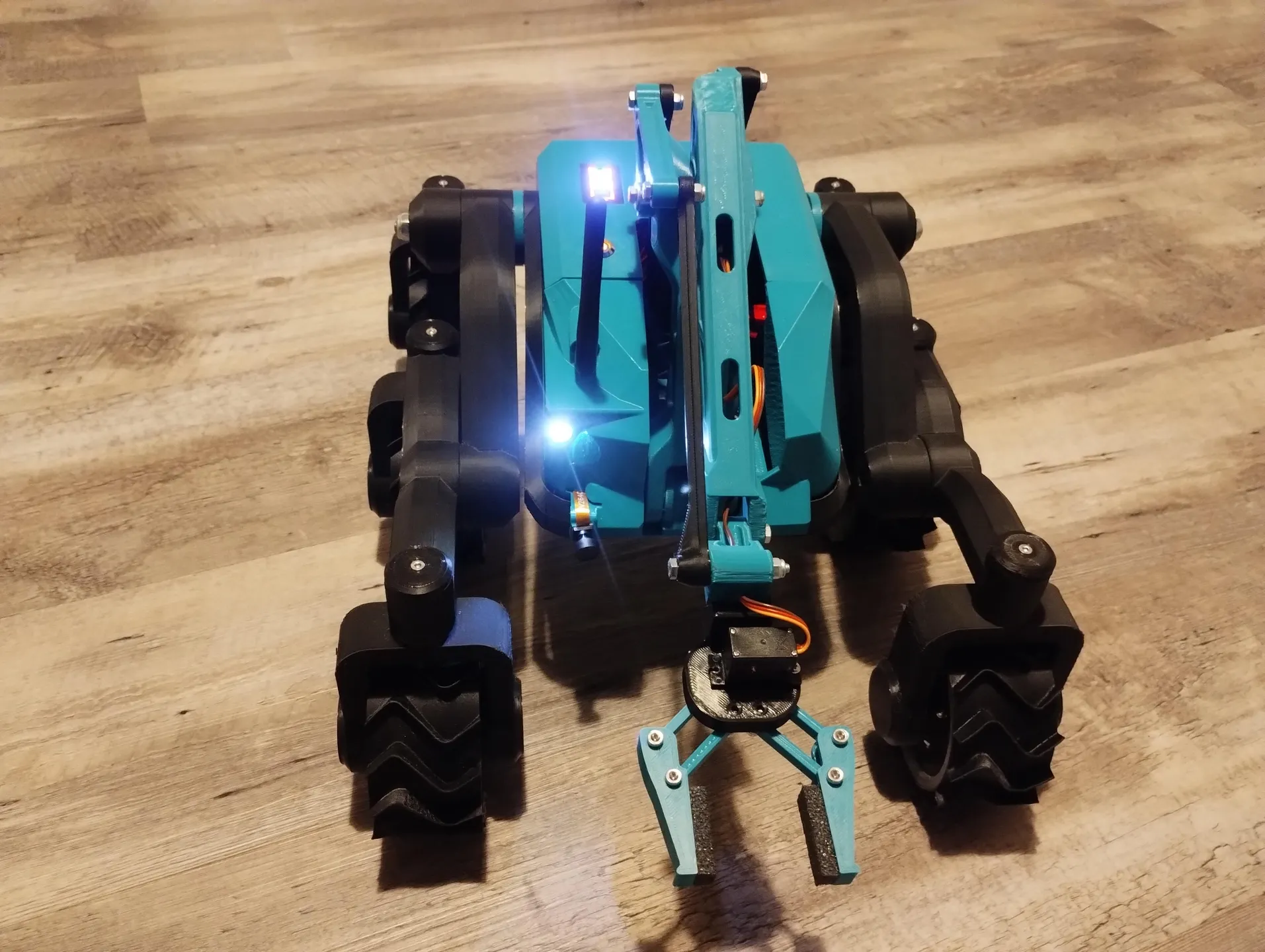
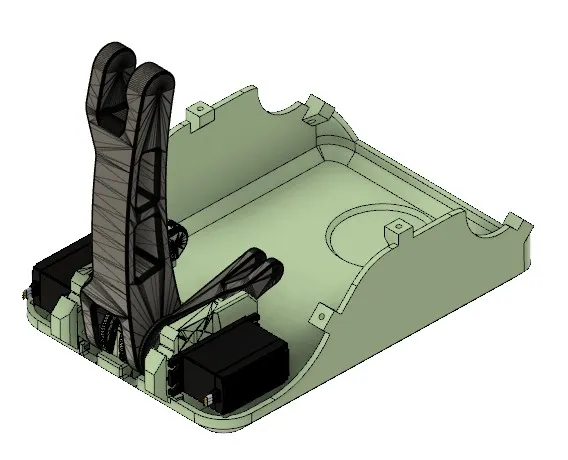
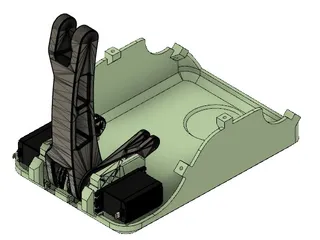
PDFModified stair climbing rover to carry a robotic arm. Mounting is in the lower frame, servos are rotated 90°, covers and frame have cutouts for the robotic arm. The ESP32 CAM with external antenna is mounted in the top cover, through which everything is controlled and the camera FPV. Arms are modified for versions without servos. The wheels are so fixed and turning is by skid. The discs are modified to avoid the need for motor mounts. Custom printed TPE tires for maximum grip, low material consumption and no supports.
All missing stl files are unchanged in the original models.
Custom design for gripper claws with SG90 servo
STL parts for the robotic arm can be found here: https://www.thingiverse.com/thing:4632254
Electrical parts I used:
1x claws: https://dratek.cz/arduino/122952-servo-mg90s-180-s-kovovymi-prevody.html
2x arm: https://dratek.cz/arduino/1694-servo-motor-s-kovovymi-prevody-mg996r-pro-rc-modely.html
LED: https://dratek.cz/arduino/121799-led-graficky-indikator-kapacity-lithiove-baterie-18650-2s.html
Power: https://dratek.cz/arduino/121707-led-vodotesny-prepinac-12-mm-zlute-podsviceni.html
Antenna: https://pajenicko.cz/index.php?route=product/product&product_id=848
Some videos:
Tags
Model origin
The author remixed this model.

Differences of the remix compared to the original
Modified: lower frame modified for robotic arm, upper covers, frame, discs...







