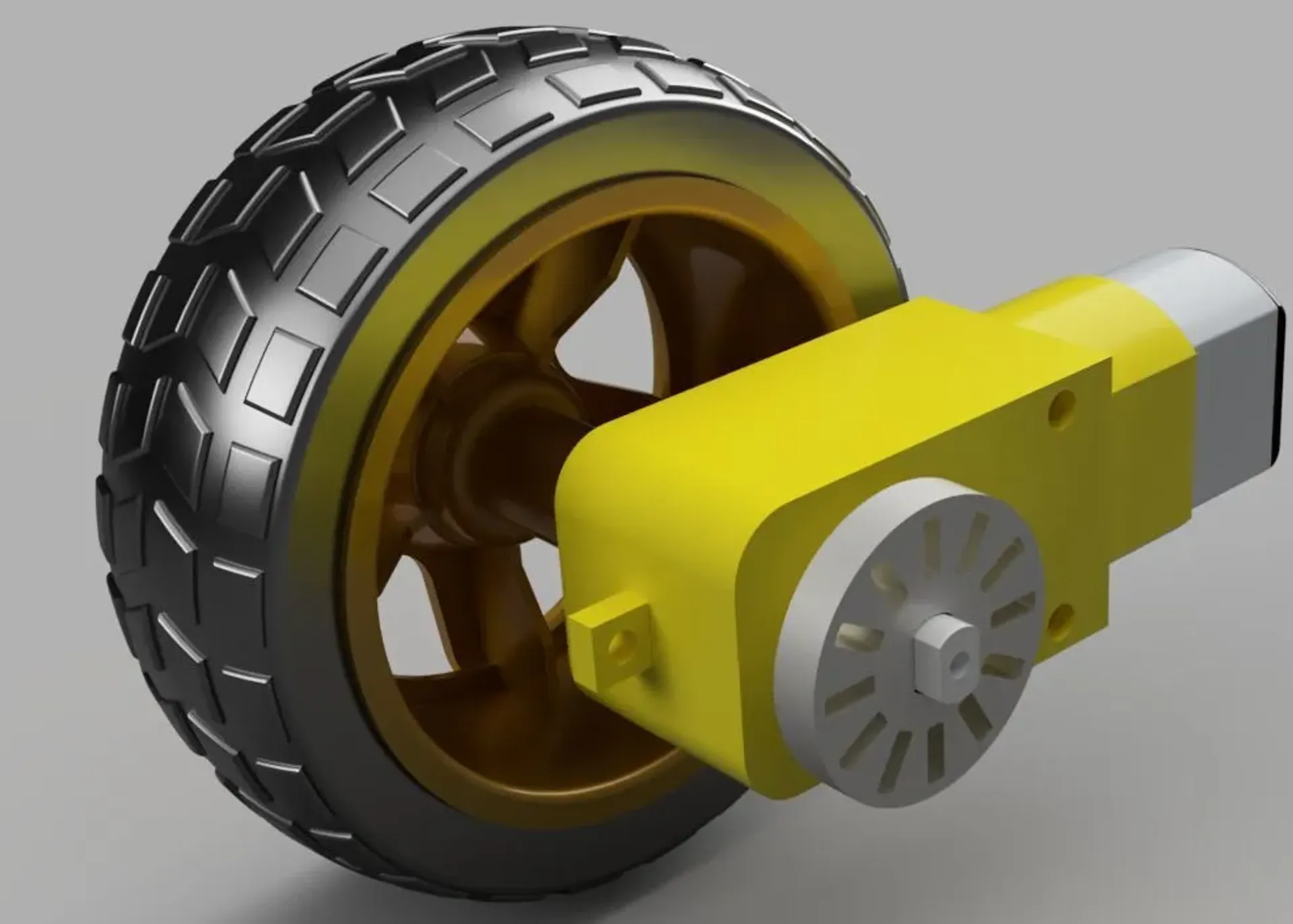
panBot - Encoder Disk TT-Motor

















Description
PDFThis Encode Disc is tested with the panBot.
https://www.prusaprinters.org/de/prints/127617-panbot
To find out how far a robot has to travel, you can use an encoder disc. This has a certain number of grids (here 12 and 20) with the help of which you can determine the rotation. The more grids the more precisely you can control. With 20 grids, we have a distance of 10.4 mm per grid that the robot travels.
Sample Code:
Calibration Lattice 12: https://makecode.microbit.org/_h3z90uEqsdmz
Calibration Lattice 20: https://makecode.microbit.org/_b9pPp7RhzKCE
Sample Code Lattice 12: https://makecode.microbit.org/_Vshe68K9VfrJ
Sample Code Lattice 20: https://makecode.microbit.org/_EjrRK2a0hHxy
Videos:
https://youtu.be/uXeBTf7sggU (Sample Code Lattice 20)
The print of the disc is required.
Furthermore, you need a sensor that recognizes the grid and sends a pulse to the controller. https://www.amazon.de/gp/product/B07TZ78N8W/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1
Connection:
VCC -> VCC
GND -> GND
Digital Output -> P0
Distance between 2 Frontwheels: 130 mm
Scope oft the Wheels: 208 mm
Print Settings
Printer Brand:
Prusa
Printer:
I3 MK3S
Rafts:
No
Supports:
No
Resolution:
0.2
Infill:
20%
Filament: gst3D PLA
Category: Robotics
Tags
Model origin
The author marked this model as their own original creation. Imported from Thingiverse.







